Document Type
Conference Proceeding
Publication Date
7-2010
Abstract
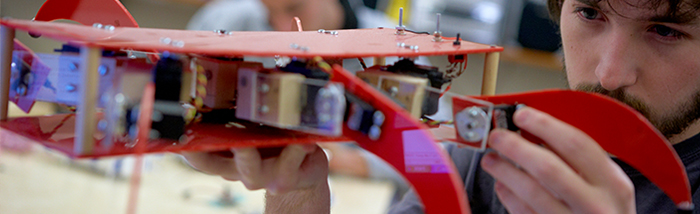
Evolving a robot’s sensor morphology along with its control program has the potential to significantly improve its effectiveness in completing the assigned task, plus accommodates the possibility of allowing it to adapt to significant changes in the environment. In previous work, we presented a learning system where the angle, range, and type of sensors on a hexapod robot, along with the control program, were evolved. The evolution was done in simulation and the tests, which were also done in simulation, showed that effective sensor morphologies and control programs could be co-learned by the system. In this paper, we describe the learning system and show that the simulated results are confirmed by tests on the actual hexapod robot.
1
Recommended Citation
Parker, G.B.; Nathan, P.J., "Concurrently evolving sensor morphology and control for a hexapod robot," Evolutionary Computation (CEC), 2010 IEEE Congress on , vol., no., pp.1,6, 18-23 July 2010 doi: 10.1109/CEC.2010.5586233
Included in
The views expressed in this paper are solely those of the author.
Comments
©2010 IEEE
DOI:10.1109/CEC.2010.5586233